|
MACHINE VISION
|
|
|
|
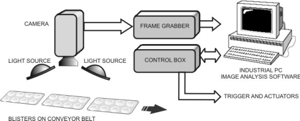
Images
from the camera are digitized and stored in the computer where it is
automatically analyzed to extract the required information. The camera
can either be a standard video camera, or in the cases of products on a
conveyor, a linear array sensor which generates a high resolution image
on a line-by-line basis. It is usually not necessary to store an ideal
image of the item being inspected. Rather, certain features of a correct
item are combined to form a model of an ideal product. The same features
are extracted from each inspected item and compared with the model. In
this way factors such as positional alignment, changes in illumination
levels and tolerances in specifications are accommodated. Often a
conventional computer is not fast enough for real applications. In such
cases special hardware must be used for parts of the problem. This
can take the form of custom designed preprocessing hardware or
commercially available high-speed vision architectures.
BY MVIS YOU CAN...
|
|
|
|