|
::
Project Proposal
EOS
Engineering Consultancy & Software Ind. Co. has started the
mini-UAV program. All the aeronitical tests were carring on by using
computational analyze methods. System airframe and wing airfoil was
tested already.
EOS
will be a small, lightweight, inexpensive and expendable unmanned
aerial vehicle (UAV) that can fly autonomously for long durations.
EOS is capable of providing low cost aerial surveillance imaging and
carrying sensor payload packages.
EOS
will also have hand-launch capability and it will be able to take
off and land itself.
|
|
::
Applications |
|
Sea
Surveillance :
• Fishing Industry
• Monitoring Fisheries
• Search and Rescue
• Environmental Monitoring
• Tracking "Targets-of-Interest"
• Sea-Life Monitoring
• Entertainment
•
Weather
|
Land
Surveillance :
• Search and Rescue
• Environmental/Pollution Monitoring
• Agriculture Moisture Data
• Wildlife Monitoring
• Livestock Monitoring
• Pipeline
• Fire Detection & Monitoring
• Hazardous Weather Monitoring
•
Weather Sensing
|
|
::
Airframe
Composite, glass fiber, carbon fiber and kevlar materials are used
for building airframe. This provides a very strong, durable and
light weight structure impervious to the environment. The design of
the aircraft is comprised of 5 self integrated system modules;
payload, avionics, fuselage, wing and ground system. This modular
concept allows for significant commonality across aircraft model
families with flexibility to change mission specific aircraft
configurations at will by simply replacing one module for another.
The aircraft stores neatly in its transportation case for easy setup
and deployment.
All
airframe was designed by 3D computational airframe design tools and
tested for aerodynamic characters and mechanical stresses.
|
|
::
Airfoil & Computational Aerodynamic Tests
EOS
Airfoil has optimum lift/drag ratio for low energy/high endurance.
New types of airfoils was used to test the criterions and also
scaled wing profiles was built for real weather tests. Airfoil
selection and tests procedures were implemented by using public
NACA, UIUC, NASA Databases and softwares. Also a software was
devoloped for simulation of autopilot and other avionic system
tests.
Fuselage/nose
and tail structure tests were also done by using computational
analyses. EOS has T-tail single-elevator, single-rudder,
semi-controlled multi-ailerons and flap for flight controls.
Ailerons can also be used as flaps for low-Reynolds numbers during
landing and take-off.
|
|
::
Engine & Drive System
EOS is powered by two pieces wing mounted, off the shelf, simple and
highly reliable brushed or brushless electric engine produced with
high flux magnet technology. Static trust is more than 1600 gr with
Li-Polymer batteries. The maximum power consumption is 300 W @12V
battery voltage (per motor). Low-cost and easy-change features are
the most important design aims. The power system utilizes
experimentaly between many motor-gear-prop alternatives and could
reach over 67% total power efficiency which results in high flight
duration and low consumption. System is able to carry an external
battery pack to increase its endurance from 60 mins to more than 90
mins. Battery system is embedded into mid-wing panel and this wing
panel is also works as a battery pack. Motors and controllers are
also embedded into wing edges and they wors as a mounting assemble
of wings. EOS power system is simple by using this multi purpose
engineering methods. |
|
|
::
Avionics
The avionics and semi-custom hardware & software with all
integration will be performed by EOS. It is designed and implemented
for the maximum endurance and have two seperate channels for data
and video transmission. All tracking and position data were
collected by using a 4 Hz integral GPS. Autopilot navigation will
have a minimum resolution for each altitude, speed and ECEF location
of 3 meters, and will have a resolution of 1° of
attitude resolution ; heading accuracy is 1°.
System is capable to navigate 200 way-points which are
pre-programmable point.
All
avionic and control systems will be mounted inside the airframe. EOS
was controlled by a custom developed microcontroller interfaced with
3 gyros, 3 accelerometers, 1 absolute and 1 differantial
pressure sensors. Navigation is asissted by s GPS module and compass
module. System can be pre-programmed through TCP/IP communication
port. All other data logged during flight will communicate over
wireless 900 MHz transciever.
|
|
::
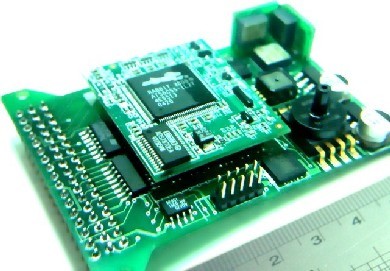
Autopilot
EOS
autopilot was designed for low-cost, mid range mini or micro uav's.
It has onboard sensor-level IMU, 2-axes magnetometer, absolute
pressure transducer as barometric altimeter and a differential
pressure transducer as pitot sensor. The fullfeatured EOS autopilot
is the lightest (24gr) and the smallest (70x45x15mm) board in its
range. High efficient onboard power regulator, onboard servo in/out,
onboard programmable digital I/O's and 12-bit analog inputs provides
efficient reliable robust control and payload control.
EOS
autopilot provides full control of a fixed-wing uav, including
auto-take off and auto-landing with ultrasonic altimeter.
The
system integrates an external GPS and an onboard magnetometer for
INS. It uses 3-axes gyros and accelerometers for attitude
estimation. The optimized embedded software enables attitude update
20 times per second and also control payload actuators as an
vibration-free stabilizer. An external radio modem is used for
telemetry, real time control (RPV) and payload control. It has also
an onboard data logger for telemetry.
|
|
|
-
Auto
take-off & landing capability
-
Autonomous
waypoint navigation
-
Return
Home & Patrol & Emergency Modes
-
Airspeed,
Altitude Hold Modes
-
Temperature
Compensation for IMU sensors
-
Onboard
Magnetometer
-
Wind
estimation
-
Auto
- trim feature
-
Onboard
data logging
-
3
inputs for battery voltage monitoring (0...24 V)
-
1
inputs for current monitoring (0...60 A)
-
2
RS232 ports for payload control
-
Hardware
filter for IMU sensors
-
EKF
filter for attitude, position, altitude and airdpeed estimation
-
4
Hz, precise and fullfeatured telemetry update
-
Aileron+Flap
or Flaperon control, elevator+Rudder or V-Tail control
-
Onboard
power regulator
-
Onboard
servo in/out
-
Easy
connection and mounting
-
Small
size & weight
|
|
::
Communication
Aircraft state vector data is available at 20 Hz with GPS position
data accuracy not more than 3 m or better in real time under
conditions allowing carrier-phase differential corrections. Single
command and control transciever and single video transmitter will be
used. Stabilized scan platform attitude is also available in real
time for payloads requiring this information. The ground-based
antenna provides real-time support to maximum 3 km, with future
ground station upgrades expected to extend this range. Custom ground
systems are available for high-EMI environments.
|
|
::
Camera Turret
EOS can fly with an vibration-free internially stabilized camera
turret fitted with either a day/night or IR micro-camera. A
stabilized turret permits the ability to persistently stare at a
point of interest rather than having to continuously 'swoop the
aircraft' at the target as with other small UAVs.
Nose
mounted 120° Tilt + 90° Pan Turret |

|
|
|
|
2000
mm
|
|
|
1230
mm
|
|
|
2800
gr (without P/L)
|
|
|
90
min (with P/L)
|
|
|
180
gr camera + 320 gr transmitter.
|
|
|
2
x Brushless type electric motor (480 Wmax/each)
|
|
|
55
km/h
|
|
Cruise
Speed:
|
|
24
km/h
|
|
Control:
|
|
Autopilot
or ground controlled
|
|
Payloads:
|
|
NTSC
day/night camera (SONY CCD) with pan-tilt-zoom
|
|
|
|
26X
optical zoom + 10X digital zoom
|
|
|
|
5
W S-Band video transmitter (LOS : 25km)
|
|
|
|
Nose
mounted 120° Tilt + 90° Pan Turret
|
|
|
|
Pan-Tilt
resolution 0.1°
|
|
Autopilot
|
|
Cascaded
IMU AHRS Conf.
|
|
|
|
GPS/INS
integration
|
|
|
|
PIC,
CIF, RPV, RC control options
|
|
|
|
Auto
Takeoff & landing (Ultrasonic altimeter)
|
|
|
|
Exernal
2 ADC, 4 TTL user I/O, 2 P/L servo control
|
|
|
|
İntegrated
compass
|
|
|
|
Battery
monitoring (Motor current + 4 Battery SOC)
|
|
|
|
Automatic
PID gain adjustments & calibration
|
|
|
|
On-board
telemery memory (1GB DC Flash)
|
|
|
|
30
Hz servo update rate
|
|
|
|
4
Hz Telemetry update rate (all data, 10 Hz for only AHRS data)
|
|
|
|
Small
sizes (65x45x15 mm)
|
|
|
|
Lightweight
(24 gr)
|
|
|
|
Low
power consumption (180 mA)
|
|
|
|

